Bipedal Robot (Programming)
Attendance:
Jiangkung 1 Present
Poom 2 Present
Garfield 5 Present
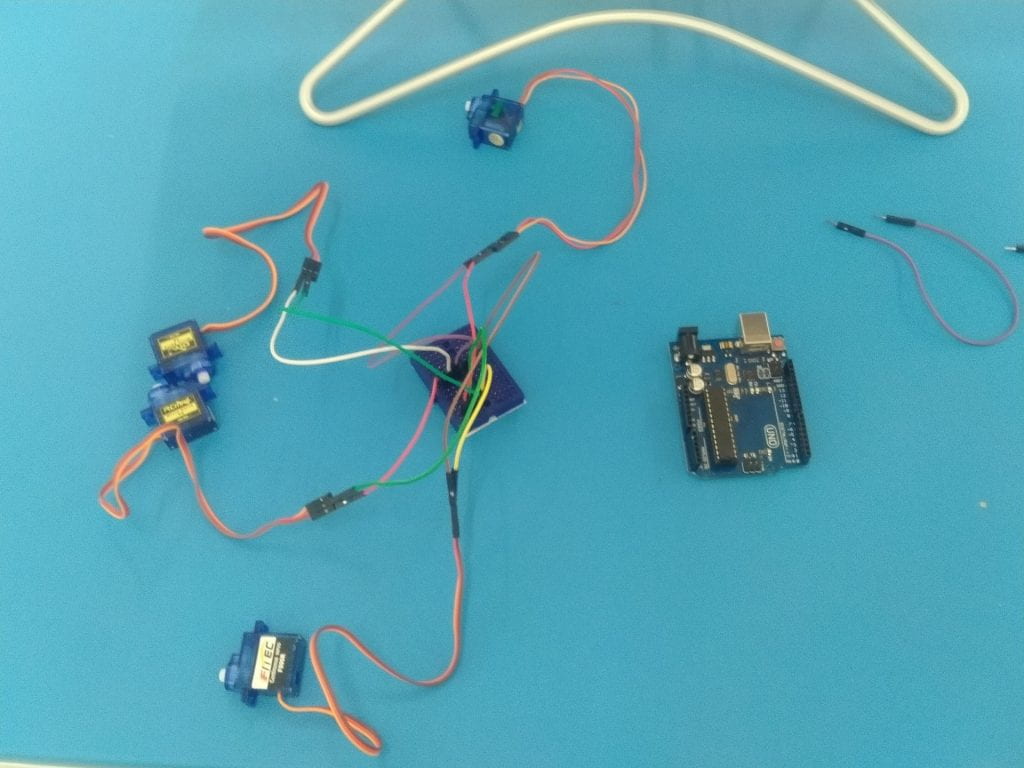
Goal: build the wire connections and program upload using four micro servo motors in Arduino
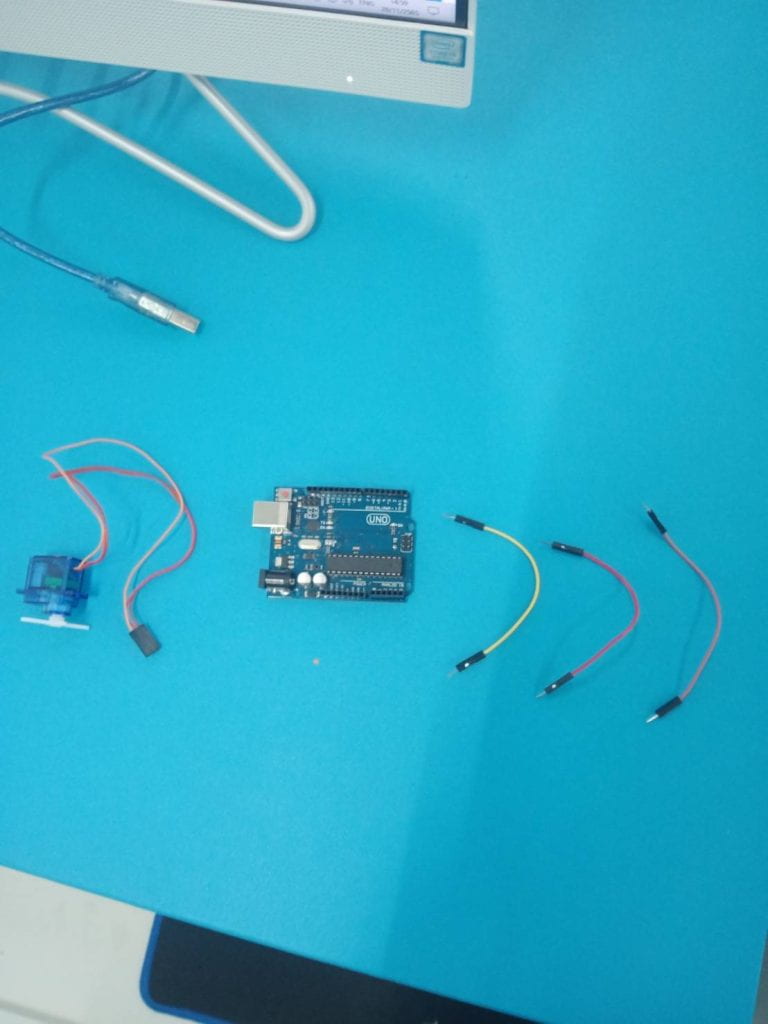
Component:
- Arduino UNO Board
- Micro Servo Motor (4)
- Jumper Wires
- BreadBoard
- Cardboard pieces
Process
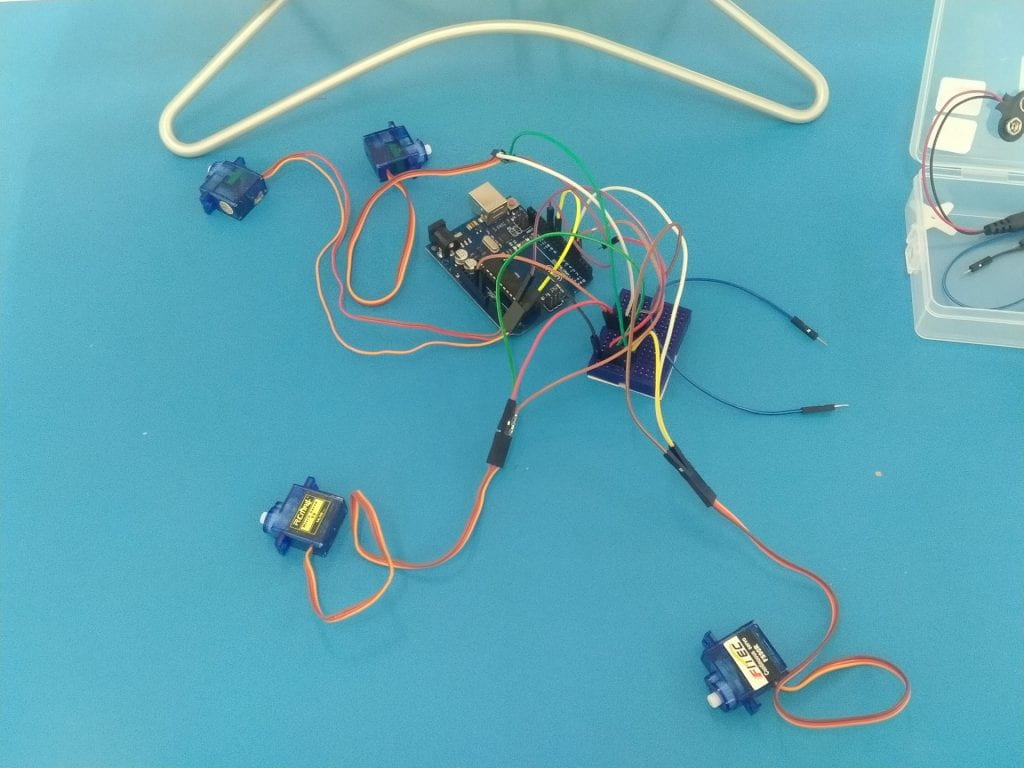
1.Add Arduino UNO board on cardboard

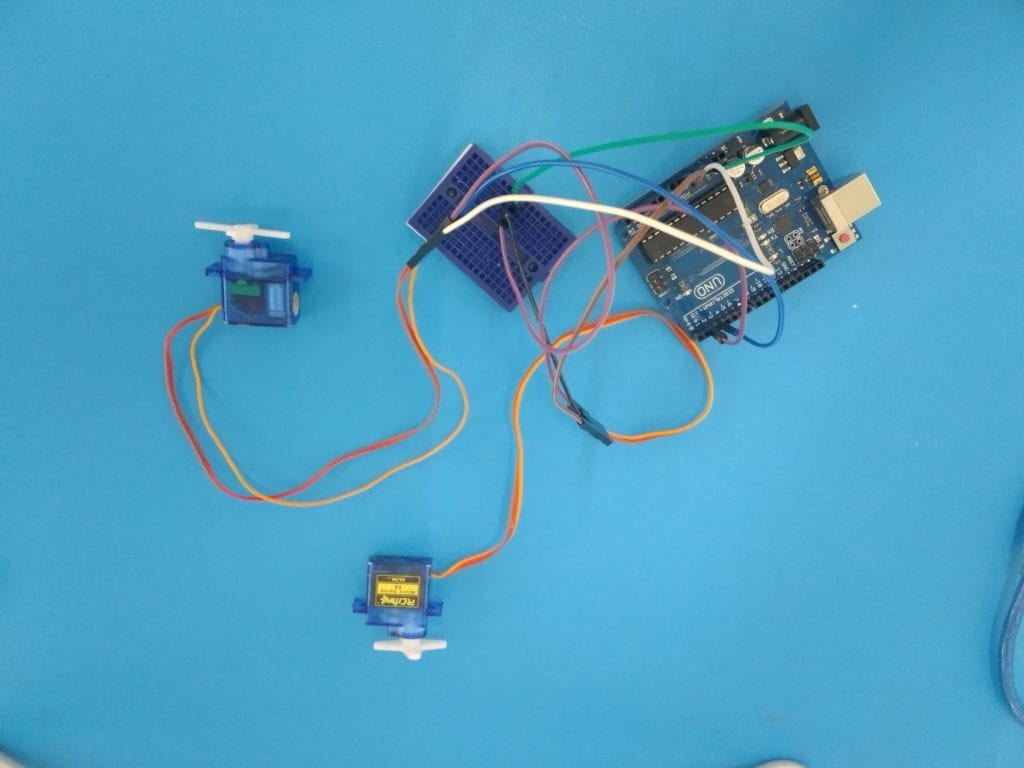
2.Put breadboard on top of Arduino board
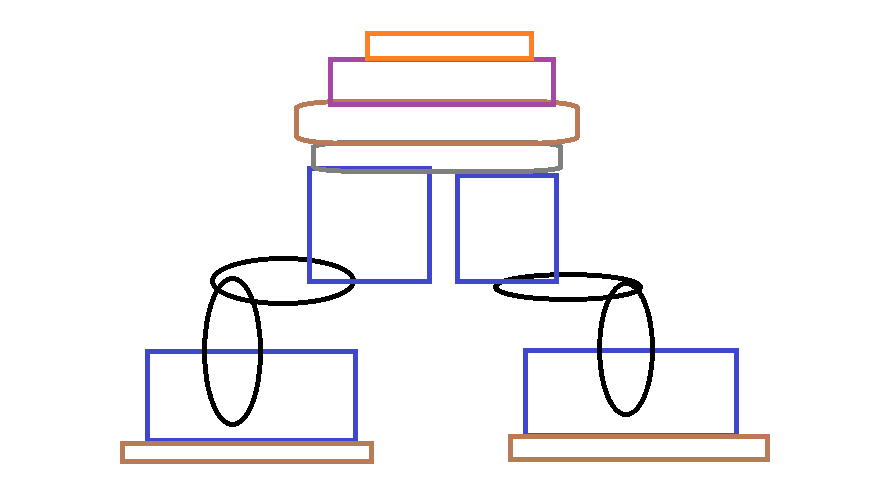
3. connect wires correctly to make it moveable
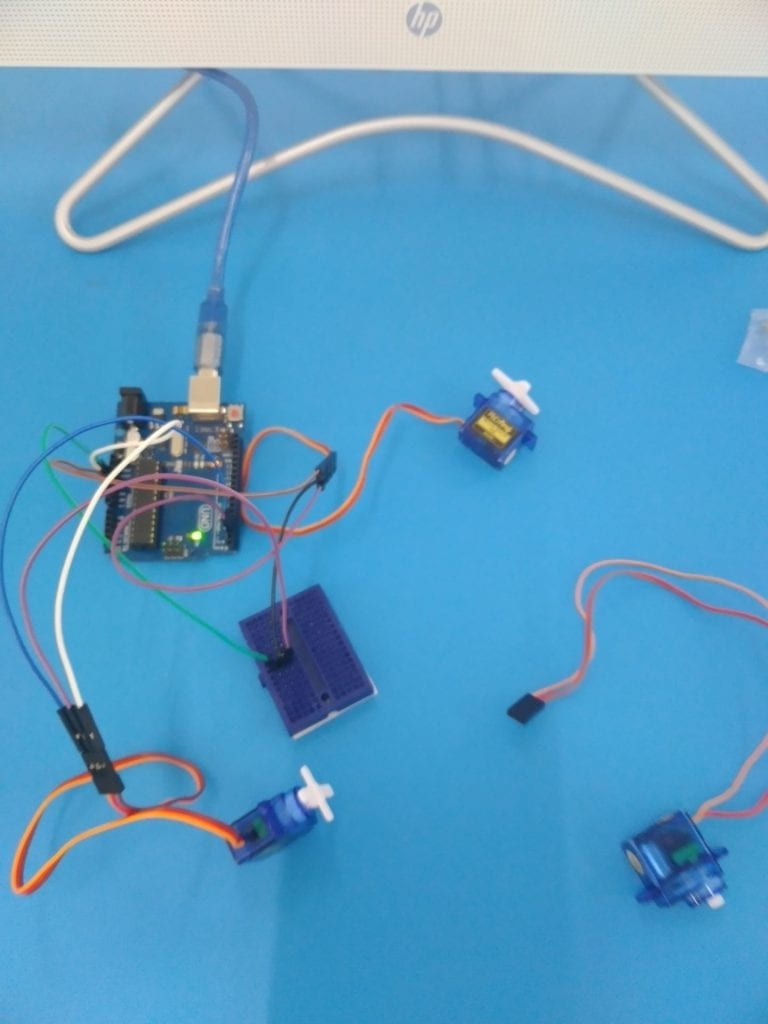
4.Plug the USB wires into robot
5.Upload this code into robot
#include <Servo.h>
Servo rightfoot;
Servo righthigh;
Servo leftfoot;
Servo leftthigh;
int pos;
void setup()
{
rightfoot.attach(3);
righthigh.attach(5);
leftfoot.attach(9);
leftthigh.attach(6);
}
void loop()
{ int pos=120;
rightfoot.write(90);
righthigh.write(90);
leftfoot.write(90);
leftthigh.write(90);delay(500);
leftfoot.write(55);delay(400);
for(int i=90;i<=115;i++)
{rightfoot.write(i);delay(12);}
leftfoot.write(120);delay(100);
leftthigh.write(120);delay(100);
delay(500);
for(int i=90;i<=120;i++)
{righthigh.write(i);delay(12);
leftthigh.write(i);delay(12);}
leftfoot.write(90);delay(300);
for(int i=115;i>=90;i–)
{rightfoot.write(i);delay(12);}
delay(500);
rightfoot.write(120);delay(300);
leftfoot.write(65);
righthigh.write(60);
for(pos=120;pos>=60;pos–)
{leftthigh.write(pos);delay(7);}
rightfoot.write(60);
delay(500);
rightfoot.write(90);delay(300);
leftfoot.write(90);delay(300);
leftthigh.write(60);delay(300);
righthigh.write(60);delay(300);
delay(500);
}
Output: (I dont have one rn so i gonna explain)
The robot’s legs should be moving side to side or maybe front to front